云开全站app网页版官方入口
云开全站app网页版官方入口
当前位置:首页 > 云开全站app网页版官方入口
功能,可帮助用户按记忆的路线自动巡航并泊入车位或自动从车位泊出并巡航至泊出点。如下图表示了记忆行车和记忆泊车在整个工作环境中的场景示意图。
通常情况下,考虑到记忆泊车实际是一种低速无人驾驶控制过程,因此就需要在记忆泊车过程中设置一定的设计运行范围才可能正真的保证其记忆建图和行驶控制具备可行性。比如,从控制逻辑上讲在记忆泊车控制中若遇到前方障碍物的情况,对于记忆行车而言,通常是采用刹车避障的方式来进行障碍物躲避。而记忆泊车则是通过转向绕行的方式来进行障碍物躲避,从这一点上讲也是记忆泊车相对于记忆行车来说十分不一样的地方。此外,从整个静态ODD上看,我们的记忆行车通常是不需要仔细考虑太多的极端的要素的。只要不是传感器本身的限制和遮挡都能保证记忆行车控制的可行性。哪怕是类似内部道路、施工路段这类场景也可以不必作为ODD范围外需要仔细考虑的要素,因为系统会根据识别的结果进行适时更新,但匹配上记忆行车的行驶路径方案相对来说还是比较单一。
自动记忆泊车是车辆无人驾驶技术的重要应用。有关技术中,为实现自动记忆泊车,通常要先生成泊车地图,泊车地图一般来说包括停车路线和停车位。根据生成的泊车地图,车辆可以自动按照停车路线行驶并停入对应的停车位,以此来实现自动记忆泊车。
记忆泊车的六个主要子功能包含记忆建图、智能泊入、沿途车位识别、智能泊出、运行过程中故障处理、动静态障碍物处理、视频监控等。
其功能核心主要是在使用智能泊入及智能泊出前利用泊车(环视摄像头)或部分行车传感器(前视摄像头)进行记忆泊车的局部地图绘制,提前学习并建立智能泊入和智能泊出的路线地图。建图完成后,用户要使用所建立的地图驱动整个智能泊入、低速巡航及智能泊出控制。且整一个完整的过程中,用户无需手动控制车辆,但不能离开座位,整个泊车过程需要用户监控系统的运作时的状态,必要时可对车辆实施制动或转向以接管车辆。如下图表示了整个记忆泊车所涵盖的功能范围示意图。

而对于记忆泊车功能而言,由于考虑到传感器识别能力、系统控制能力等因素,通常是需要制定比较严格的ODD适合使用的范围,并且整个控制过程中,驾驶员对于整车控制是可以每时每刻介入的。如下图列举了几个关键的ODD要素。

和记忆泊车系统类似,记忆行车其实就是一种针对宿主车辆中预先记录的轨迹进行智能辅助驾驶的控制过程。整一个完整的过程实际是包含低速巡航和辅助泊车的过程场景。智能泊车控制过程在最后一定的时间通常是允许用户下车,通过手机短程遥控车辆过自动泊入车位的,这一过程需要从遥控泊车模块调动相应的控制过程。


以典型的泊车算法处理芯片为例,整个记忆泊车处理流程分为两条主线:环视摄像头输入的数据通过TDA4上的VPAC模块进行ISP处理后,可以分两步进行分流,其中一路是通过C66模块中的两个DSP核分别进行前处理和后处理,同时C7x/MMA上完成神经网络的实时处理。
数据采集阶段通过对整个停车场进行分层全方位数据采集,并将建图所需的前视视频、环视视频上传至数据管理中心,通过泊车质检标注系统来进行预处理生成相应的时间戳信息、定位信息、传感器标定信息,并结合先前预置地图信息PreMap(该预置地图信息可以是由其他车型采集生成后由本车通过云端下载)生成两套不同的感知模型信息。随即生成的摄像头模型数据信息和超声波识别模型信息(分别为泊车轨迹信息和车位识别信息),随后进行数据后处理(对所有传感器进行时间同步、不同物体进行物体关联、泊车轨迹融合修正、车位识别修正等)。最后将生成的数据输入地图模型进行相对有效的数据训练。

其中,在泊车建图过程中常常要云端通过预设的置信度算法对所建立的地图预设置信度,在泊车激活试用阶段,通过将符合预设置信度的泊车地图直接下发至车端,使车端可以直接根据泊车地图进行自动记忆泊车。这里需要说明的是,预设泊车地图置信度的算法实际是通过人工质检的方式来进行筛选和设置(又称质检),对置信度的程度进行相对有效的编号。这类质检过程实际类似于BEV建图过程中的真值标注一样,如果待质检的泊车地图的数量较多,由人工对每一份泊车地图进行质检将产生大量的人力成本,同时影响质检效率。因此,考虑自动化的质检方式也显得较为重要。如上图所示表示了整个记忆泊车建图至图像质检的整个过程。
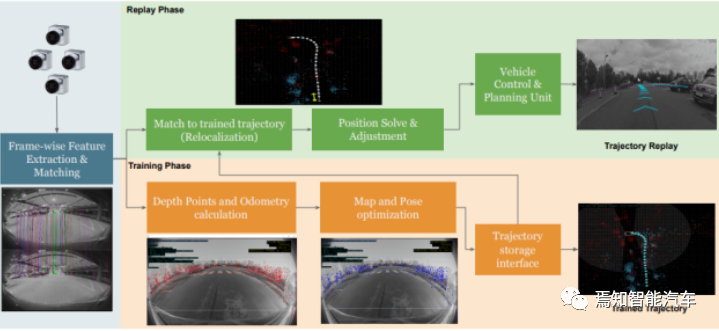
如下图表示的是一种典型的泊车建图与重定位的示意图。其中输入端包含4枚环视感知的摄像头,在建图阶段,考虑了多个环视摄像头之间可能会产生深度点云可以对其进行距离估计,并将对应的建图和位置做优化。其生成的轨迹进行存储,并把相应的接口暴露出来供其他模块调用。此外,该四个环视视频将作为整个建图的特征提取输入,通过云端接口下载已生成的地图数据,匹配到被训练过的建图轨迹,并进行相对有效的重定位、且查询到当前位置并调整整个车身姿态。最后,通过车辆轨迹规划和控制单元进行整车控制响应。
注意,对于这里所建立的地图并非高精地图,也非导航地图。当然泊车建图的距离相对于行车来说是小很多,因为这类路径需要包含的信息量还是比较大的,且不同车位、泊入泊出过程都需要同步建立不同的地图。地图信息需要重点包括如下一些信息:
①车道标志信息:车辆运行轨迹信息(如x、y、z坐标),车位信息(四个角点x,y,z坐标)这里的Z轴信息主要是指跨层之间的信息。除此以外还有一些停车场的路标信息:如路口、柱子、减速带、坡道;
③停车位确认和新增停车位的植入信息:即目标车位以及行驶到目标车位中间可能检测到的对应车位。
与记忆行车存储方式类似,记忆泊车的存储单元也是位于智能驾驶域控制器中,可以在划定的EMMC中,且整个地图存储过程是在用户完成建图后自动触发存储。地图可以同步选择存储在云端,如果考虑车车互联,该地图也可当作联网其他车辆的的泊车地图。当良好的情况下,且自车通过定位到自身处于对应的停车场时,便可以启动后台下载程序控制车辆优先从云端下载地图,生产和存储。
之前提到,地图建立过程中是需要对地图的张数限制最大值的。那么超过最大值的情况就需要向前进行地图覆盖。
建图过程不能均保证建图成功,当建图失败时,该地图路线将不能用于泊车控制,这是需要从后台启动日志记录功能,将建图失败的原因进行详细记录。同时,系统前台一定要通过HMI提示用户建图失败。
为实现智能泊入和智能泊出功能,用户需先在停车场内驾驶车辆进行智能泊入和智能泊出路线学习,智驾车后台系统存储对应记忆的地图路线。
整个建图过程中常常要对泊入路线、泊出路线、最大允许的倒车距离提出对应的建图要求。比如泊入过程建图时,需要仔细考虑整个停车场支持从不同的停车入口进入,且均可以建立不同泊车路线的地图。而泊出过程则需要支持统一停车场的不同车位建图。这样的一个过程需要仔细考虑统一停车场内对不同停车位作为起点均可建立一张泊车路线图。

Step1:智驾车辆驶入停车场内,通过车机系统激活泊车类型(按键/语音)为泊入;
Step2:车机系统要显示记忆泊车功能界面,用户要根据提示手动驾驶车辆前往目标车位;
Step3:到达目标车位附近后,用户都能够直接拨入车位,并挂入P档。也可以在车机系统上点击确认识别到车位;
Step4:控制车辆泊入后,系统通过后台自动验图并保存对应所建立的地图数据;
Step5:建图成功后,如果驾驶员继续选择泊车召唤建图,则进入Step7泊出建图流程。否则,此次建图结束;
Step6:接收到驾驶员输入的建图类型为泊出请求时,驾驶员可以手动驾驶汽车前往泊出点;此时系统确认完驾驶员此次泊出过程结束时,系统后台生产并检验此地图数据。
这里必须要格外注意的是,智能泊入和泊出需要分开建立不同的两张图,泊入和泊出地图会由一个属性相互关联。建图过程需满足建图距离、车速、以及建图算法匹配的要求。通常单程(泊入或泊出)建图距离不超过一定值(比如2km),建图过程中车机系统能实时的显示建图距离,并适时的提醒驾驶员。此外,如果考虑建图的有效性与性能,通常也对驾驶速度有一定要求(一般小于20kph),如果长期超速超过一定的时间阈值,则提示驾驶员超速退出。并且,根据不同的车位信息可以触发建立不同的地图,这样的地图数量其实就是有一定的要求的。比如最多可以存储10张地图用于标识10个车位信息。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

系统绿色动力与智慧汽车参展范围Scope of Exhibits:1、
及中央域控制(Domain)和区域控制(Zonal)架构是下一代车载网络的发展趋势。然而对于
信息,从而比最好的人类司机更快、更及时地做出决策。我们在开车时获得的大部分信息来自于
事故,和最近在Defcon上演示的如何干扰传感器,都充分说明了传感器在
实现的基础,若无法正确地感知周围环境,那么接下来的认知、决策与控制,都是空中楼台。
汽车和互联汽车的出现对无线连接测试领域提出了更加高的要求,尤其是汽车产业正在推行的汽车到万物(V2X)
习惯、运输行业并更广泛地影响社会。 我们不仅仅可以将汽车召唤到我们的家门口并在使用后将其送走,
就是解决“我在哪儿”的问题,并且对可靠性和安全性提出了非常高的要求。除了GPS与惯性传感器外,我们一般还会使用LiDAR点云与高精地图匹配,和视觉里程计算法等定位方法,让各种定位法
;某些高科技公司则希望能够通过各种外部传感器实时采集海量数据,处理器经过数据
与Google等企业研发的等级完全不同,在Google等企业所研究的第四
五:控制执行篇,转向制动电子需要报告的关注微信公众号:AI汽车人回复“
之间不仅仅可以相互通信,它们的出现也让城市的交通环境变得更绿色和高效。汽车将自行搜寻停车地点,然后进行
的追求正在稳步推进。如今,几乎所有汽车经销商的新款车都配备了多个摄像头、雷达和超声波传感器,可实现如辅助
,目前来看成本还是非常高的。若干车企宣布了2020-2021年左右实现L3
,目前来看成本还是非常高的。若干车企宣布了2020-2021年左右实现L3
能应对数千种城市道路交互与通行状况——过去数年这一问题一直困扰着它。这是自2012年以来谷歌首次正式更新
申请理由:很喜欢硬件功能完善的机器人,这款机器人上面的多种传感器及器件均用过,超声波传感器和巡线传感器还未接触过,想了解下这种传感器的灵敏度和精度,而且近年来
还没有成熟,只有少数的实验累积之前,不应该投入商用,不能拿民众生命开玩笑。也有部分网友认为,现在
黑客出现以来的解决方法。只有当一个企业受到攻击时,其他公司才会开始做出一定的反应,通常是争先恐后的提升个人的安全性,希望自己的生意不会成为下一个目标。
,包括前视、后视和360度摄像系统,后视和360度摄像头主要提供360度外部环境呈现,前视摄像头大多数都用在识别行人、
一样,我们在这方面做的工作越多,就会发现更多要解决的复杂用例。这种复杂性将继续对现有
和周边相关设施的通讯。预计到2025年,几乎所有的新车都将配备无线数据通讯
研发能力,赢得全球竞争优势。下面就随汽车电子小编共同来了解一下相关联的内容吧。近期以来,谷歌母公司Alphabet旗下的
是足够安全的,至少在传感器故障的时候不会来个吓人的急刹车。但缺点是将这项
为人们勾勒出了一副美好的未来出行的画面:坐上没有方向盘的汽车,一觉睡到公司门口;甚至我们可能不再拥有一辆汽车,需要出门时共享
自行车何时能实现「自己行走」呢?自行车属于欠驱动系统,如果不来控制就没办法实现稳定站立最近,B站野生
协会野生钢铁侠、「华为天才少年计划」入选者、AI算法工程师稚晖君发布了一个「
系统正在激起业界最大的兴趣和活动,并且预计,并非不合理地,最终它们将成为实现
员成为一个单纯的乘客。这将减轻与人体注意力丧失,误判和疲劳相关的风险。图像感应将成为大量
基础是摄像头(机器视觉)、毫米波雷达、超声雷达;二是以谷歌等网络公司为代表的“无人
前后保险杠上,添加了光电避障电路、测速电路、光源引导电路和电机驱动电路。只要
(报告出品方/作者:国金证券,翟炜)报告综述产业链与市场空间:当前我国
正处于 L2 向 L3 级别转化的阶段,预 计 2025 年 L2.5 级别
最近,我和我的一个朋友进行了一次有趣的讨论,他知道我在研究用于ADAS系统和
的130辆测试版雪佛兰电动汽车Bolt今天从密歇根州的Orion工厂正式下线,这也是首款采用量产工艺打造的、标明具备
员坐在方向盘后面(当然,也许会有一个,但并不是从传统的角度实际使用操控机制)。与
福特在本届洛杉矶车展上推出了福特锐界概念车。据悉,这款车中搭载了全新的
。 IIHS企业来提供的数据表明,2007-2012年间,全球SUV销量增长了45%。目前,福特锐界在美国市场上仍是该细分市场的领跑者,市场占有率达到23%。
概念车,但为什么直至最近无人车才不再被视为科幻小说,而是眼下将实现的革命性科学技术产品?追其原因,主要在于,人工智能的显著进展,以及开发无人车的所需
——出租车、拼车或公交车,能够将我们从公共交通站、市中心或办公区域带到想去的地方(最后一公里)。有没有更好的ADAS系统解决方案,对接口进行衔接?
汽车已经行驶近30万公里了,非常的强大~~上次参加了重庆新能源汽车峰会,对会上富士通半导体宣讲的一款全景视频汽车实时监控
汽车本质上是一台装有轮子的高性能计算机,它通过大量的传感器来收集数据。为了使得这些
汽车(AV)和电动汽车(EV)的未来的形成,和别的可能出现的趋势。在整个演讲中,两位发言者谈到了
化的汽车开发者应该开始解决人与机器之间的“沟通失败”的问题了。如果你觉得
,而是通过编程、AI和车载感知系统(如激光、摄像头和雷达)换道。就此,我们就
,APA控制管理系统接口确定,系统多个模块的功能算法设计等。整个控制算法设计合理有效,为

 加微信咨询
加微信咨询